GoogleNet: Cột mốc đột phá trong lĩnh vực trí tuệ nhân tạo
1. Giới thiệu
GoogleNet, còn được biết đến là Inception, là một trong những mạng nơ-ron tích chập (Convolutional Neural Network – CNN) tiên tiến nhất được phát triển bởi nhóm nghiên cứu của Google vào năm 2014. Mạng này đã giành chiến thắng tại cuộc thi ImageNet Large Scale Visual Recognition Challenge (ILSVRC) năm đó, đánh dấu một bước tiến lớn trong lĩnh vực trí tuệ nhân tạo (AI).
GoogleNet không chỉ nâng cao độ chính xác trong nhận dạng hình ảnh mà còn tối ưu hóa tài nguyên tính toán, mở ra một kỷ nguyên mới cho các ứng dụng AI trong công nghiệp và đời sống.

Trước khi GoogleNet xuất hiện, các mạng CNN như AlexNet (2012) và VGGNet (2014) đã chứng minh được tiềm năng của học sâu trong nhận dạng hình ảnh. Tuy nhiên, những mạng này vẫn gặp phải một số hạn chế:
- Kích thước và độ sâu của mạng: Mặc dù mạng sâu có khả năng học đặc trưng phức tạp hơn, nhưng chúng đòi hỏi lượng tài nguyên tính toán khổng lồ và thời gian huấn luyện dài. AlexNet với 8 lớp và VGGNet với 16 đến 19 lớp đã tiêu tốn hàng triệu tham số, dẫn đến chi phí huấn luyện cao và nguy cơ quá khớp (overfitting).
- Hiện tượng vanishing gradient: Khi mạng càng sâu, việc huấn luyện trở nên khó khăn do hiện tượng vanishing gradient, làm cho các tham số ở các lớp đầu không được cập nhật đầy đủ, dẫn đến hiệu suất kém.
GoogleNet ra đời nhằm giải quyết những hạn chế này bằng cách cải tiến cấu trúc CNN truyền thống và tối ưu hóa tài nguyên sử dụng.
2. Kiến trúc đột phá
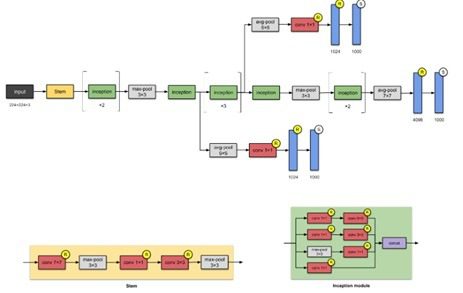
Điểm nổi bật nhất trong GoogleNet chính là sự xuất hiện của Inception Module – một khối xây dựng sáng tạo kết hợp nhiều lớp tích chập và pooling trong một cấu trúc phức hợp. Ý tưởng chính của Inception là cho phép mô hình học các đặc trưng ở nhiều cấp độ khác nhau từ một lượng thông tin đầu vào nhất định.
2.1. Inception Module
Inception Module là một cải tiến mang tính đột phá với các đặc điểm chính sau:
Các lớp tích chập song song với các bộ lọc khác nhau:
Inception Module bao gồm các lớp tích chập với kích thước bộ lọc khác nhau như 1×1, 3×3, 5×5, và một lớp pooling. Điều này giúp mô hình học được các đặc trưng từ các vùng không gian có kích thước khác nhau trong hình ảnh, đồng thời giảm thiểu mất mát thông tin do kích thước bộ lọc cố định.
Bộ lọc 1×1:
- Bộ lọc 1×1 được sử dụng trong Inception Module để giảm số lượng kênh trước khi đưa qua các lớp tích chập sâu hơn. Điều này giúp giảm chi phí tính toán và số lượng tham số cần thiết mà vẫn giữ nguyên được các thông tin quan trọng từ dữ liệu đầu vào.
- Lớp pooling song song:
- Inception Module cũng bao gồm một lớp pooling song song (thường là Max-Pooling hoặc Average-Pooling) giúp giảm kích thước không gian của đặc trưng, đồng thời tăng tính bất biến của mô hình đối với các biến đổi hình học của dữ liệu.
- Liên kết các lớp:
- Đầu ra của tất cả các lớp trong Inception Module (các lớp tích chập và pooling) được liên kết lại với nhau thành một tensor duy nhất, tạo ra đầu ra của Inception Module. Kết quả là mô hình có thể tích hợp thông tin từ nhiều cấp độ khác nhau, cải thiện độ chính xác trong việc nhận dạng các đối tượng phức tạp.
2.2. Kiến trúc toàn diện của GoogleNet
GoogleNet được xây dựng từ nhiều Inception Module xếp chồng lên nhau, tạo thành một mạng sâu có khả năng học đặc trưng từ dữ liệu đầu vào một cách hiệu quả hơn so với các mô hình CNN truyền thống. Mặc dù có 22 lớp trọng số, GoogleNet chỉ sử dụng khoảng 5 triệu tham số, so với hơn 100 triệu tham số của VGGNet, nhờ vào sự tối ưu hóa kích thước lớp và việc sử dụng bộ lọc 1×1.
2.3. Các cải tiến công nghệ khác
Ngoài việc sử dụng Inception Module, GoogleNet còn tích hợp một số cải tiến khác nhằm tăng cường hiệu suất và độ ổn định của mô hình:
Lớp Softmax phụ (Auxiliary Classifiers):
- GoogleNet sử dụng các lớp Softmax phụ ở giữa mạng để giúp quá trình huấn luyện ổn định hơn, đặc biệt là khi mạng trở nên rất sâu. Những lớp này hoạt động như một dạng giám sát bổ sung (auxiliary supervision), giúp mô hình hội tụ nhanh hơn và giảm nguy cơ gặp phải hiện tượng vanishing gradient.
- Global Average Pooling:
- Thay vì sử dụng các lớp fully connected với hàng triệu tham số như trong các mạng truyền thống, GoogleNet sử dụng Global Average Pooling ở cuối mạng, giúp giảm thiểu số lượng tham số, tránh hiện tượng overfitting và cải thiện khả năng tổng quát của mô hình.
3. Hiệu suất
GoogleNet đã gây ấn tượng mạnh tại cuộc thi ImageNet Large Scale Visual Recognition Challenge (ILSVRC) 2014 khi đạt được độ chính xác top-5 là 93.33% (tương ứng với tỷ lệ lỗi chỉ 6.67%), thấp nhất trong số các mô hình tham gia và vượt qua mọi đối thủ, bao gồm cả các mạng nổi tiếng như AlexNet và VGGNet. Thành công này đã khẳng định hiệu quả vượt trội của kiến trúc Inception và tiềm năng to lớn của các mô hình CNN được tối ưu hóa về cấu trúc.
Một trong những điểm nổi bật của GoogleNet là khả năng cân bằng giữa hiệu suất và tính hiệu quả. Dù có trên 20 tầng sâu (không tính các tầng phụ trợ), GoogleNet chỉ sử dụng khoảng 5 triệu tham số, ít hơn rất nhiều so với VGGNet, vốn cần đến 138 triệu tham số. Nhờ vào việc tối ưu hóa bằng các khối Inception, GoogleNet không chỉ giảm chi phí tính toán mà còn cải thiện khả năng nhận diện các đặc trưng phức tạp, từ các chi tiết nhỏ đến các đặc điểm toàn cục của hình ảnh.
Trong các bài kiểm tra thực tế:
- GoogleNet đã thể hiện khả năng phân loại xuất sắc trên tập dữ liệu ImageNet với 1,2 triệu hình ảnh thuộc 1.000 danh mục.
- Mạng này cũng hoạt động hiệu quả trong các bài toán phát hiện vật thể khi kết hợp với các mô hình như R-CNN, chứng minh tính ứng dụng linh hoạt của nó.
Ngoài ra, kiến trúc của GoogleNet đã mở đường cho các phiên bản cải tiến như Inception-v2, Inception-v3, và Inception-v4, tiếp tục nâng cao độ chính xác và giảm chi phí tính toán. Ví dụ, Inception-v3 đạt tỷ lệ lỗi top-5 chỉ còn 3.5% trên ImageNet, gần ngang bằng với khả năng nhận diện của con người.
GoogleNet không chỉ là một bước ngoặt trong nghiên cứu trí tuệ nhân tạo mà còn trở thành tiêu chuẩn vàng cho các ứng dụng thực tế như phân loại hình ảnh y tế, nhận diện khuôn mặt, và hệ thống tự động hóa dựa trên hình ảnh.
4. Tầm ảnh hưởng
Sự thành công của GoogleNet đã mở ra một kỷ nguyên mới trong thiết kế và phát triển các mạng nơ-ron tích chập:
4.1. Sự phát triển của các biến thể Inception
Sau GoogleNet, nhiều biến thể khác của Inception đã được phát triển như Inception-v2, Inception-v3, Inception-v4, và Inception-ResNet. Những biến thể này không chỉ nâng cao hiệu suất mà còn mở rộng khả năng áp dụng của CNN trong nhiều lĩnh vực khác nhau.
4.2. Cải tiến trong thiết kế mạng sâu
GoogleNet đã khơi mào cho một loạt các nghiên cứu mới về thiết kế mạng sâu, tập trung vào việc tối ưu hóa tài nguyên và hiệu suất. Các mạng như ResNet (2015), DenseNet (2017), và EfficientNet (2019) đều chịu ảnh hưởng từ triết lý thiết kế của GoogleNet, với mục tiêu đạt được hiệu suất cao hơn mà không tăng đáng kể số lượng tham số hoặc tài nguyên tính toán.
4.3. Tác động đến phát triển phần cứng
GoogleNet không chỉ tác động đến thiết kế mạng nơ-ron mà còn thúc đẩy sự phát triển của phần cứng máy tính, đặc biệt là trong việc tối ưu hóa GPU và thiết kế bộ xử lý tensor chuyên dụng (TPU). Việc GoogleNet đạt được hiệu suất cao với số lượng tham số ít đã tạo động lực cho việc nghiên cứu và phát triển các giải pháp phần cứng mới, phù hợp với các mô hình học sâu có cấu trúc phức tạp và nhu cầu xử lý dữ liệu lớn.
5. Ứng dụng

GoogleNet và các biến thể của nó đã được áp dụng rộng rãi trong nhiều ứng dụng công nghiệp và thương mại:
5.1. Nhận dạng hình ảnh và đối tượng
GoogleNet đã được sử dụng trong các hệ thống nhận dạng hình ảnh để phân loại và phát hiện đối tượng trong ảnh và video, đặc biệt trong các ứng dụng giám sát an ninh, tự động hóa, và quảng cáo.
5.2. Y tế
Trong y tế, GoogleNet đã được ứng dụng để phân tích hình ảnh y khoa, giúp chẩn đoán các bệnh như ung thư, tổn thương não, và các vấn đề liên quan đến hình ảnh khác. Mô hình này cho phép các chuyên gia y tế phát hiện sớm các dấu hiệu bất thường, cải thiện chất lượng chăm sóc bệnh nhân.
5.3. Lái xe tự động
Trong ngành công nghiệp xe tự lái, GoogleNet được sử dụng để nhận diện và phân tích các đối tượng trên đường, từ biển báo giao thông, người đi bộ, đến các phương tiện khác. Nhờ khả năng xử lý hình ảnh hiệu quả, GoogleNet giúp các hệ thống xe tự lái hoạt động an toàn và đáng tin cậy hơn.
5.4. Tìm kiếm hình ảnh và video
GoogleNet cũng đã được tích hợp vào các công cụ tìm kiếm hình ảnh và video, giúp cải thiện khả năng tìm kiếm dựa trên nội dung trực quan, tăng cường trải nghiệm người dùng trên các nền tảng như Google Images và YouTube.
6. Kết luận
GoogleNet không chỉ là một cột mốc quan trọng trong sự phát triển của trí tuệ nhân tạo mà còn là nguồn cảm hứng cho nhiều nghiên cứu và ứng dụng sau này. Bằng cách tối ưu hóa hiệu suất mà không cần tăng đáng kể số lượng tham số, GoogleNet đã chứng minh rằng việc thiết kế thông minh và sáng tạo có thể mang lại những cải tiến đáng kể trong công nghệ AI.
Di sản của GoogleNet không chỉ nằm ở các giải thưởng mà nó đạt được mà còn ở những đóng góp lâu dài cho sự tiến bộ của học sâu và trí tuệ nhân tạo trong tương lai.