SSD: Giải pháp hiệu quả cho bài toán phát hiện đối tượng
1. Giới thiệu
Trong lĩnh vực thị giác máy tính, phát hiện đối tượng là một nhiệm vụ quan trọng với mục tiêu không chỉ phân loại các đối tượng trong một hình ảnh mà còn xác định vị trí của chúng. Phát hiện đối tượng đóng vai trò quan trọng trong nhiều ứng dụng như giám sát an ninh, lái xe tự động, robot và các hệ thống thực tế tăng cường. Trước khi các mô hình SSD xuất hiện, các phương pháp như R-CNN, Fast R-CNN và Faster R-CNN đã là tiêu chuẩn vàng cho phát hiện đối tượng, nhưng chúng có một số hạn chế về tốc độ và độ phức tạp trong quá trình triển khai.
SSD (Single Shot Detector) là một bước đột phá lớn trong việc phát hiện đối tượng, được thiết kế để vượt qua những hạn chế của các phương pháp trước đó. SSD thực hiện nhiệm vụ phát hiện đối tượng chỉ trong một lần truyền qua mạng (single shot), từ đó cải thiện đáng kể về tốc độ mà không phải hy sinh độ chính xác, làm cho nó trở thành lựa chọn lý tưởng cho các ứng dụng thời gian thực.
2. Kiến trúc SSD
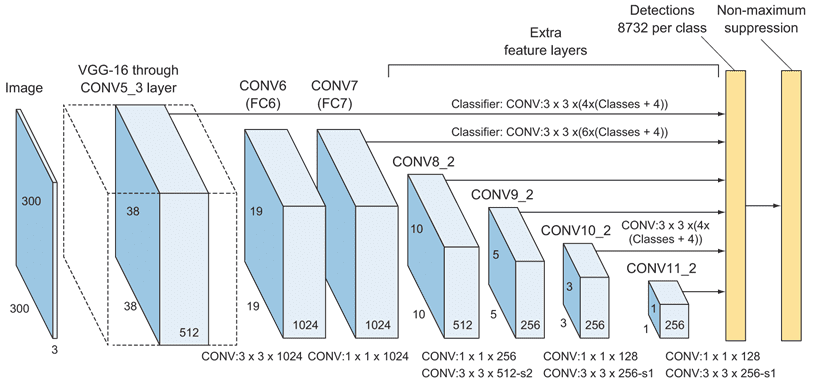
SSD có một kiến trúc rất đặc biệt, cho phép nó thực hiện nhiệm vụ phát hiện đối tượng một cách nhanh chóng và hiệu quả. Kiến trúc của SSD bao gồm các thành phần chính sau: mạng cơ sở (base network), các lớp tích chập bổ sung (extra feature layers), các bộ khung mặc định (default boxes), và hàm mất mát (loss function).
2.1. Base Network
Mạng cơ sở của SSD được xây dựng trên các mô hình CNN đã được chứng minh hiệu quả như VGG-16 hoặc ResNet. Trong SSD gốc, VGG-16 được sử dụng làm mạng cơ sở, với các lớp Dense (Fully Connected) cuối cùng bị loại bỏ. VGG-16 là một mô hình CNN sâu với nhiều lớp tích chập, được thiết kế để trích xuất các đặc trưng từ hình ảnh đầu vào.
Cấu trúc VGG-16:
Conv Layers
VGG-16 bao gồm 13 lớp tích chập (conv layers), được sắp xếp thành 5 khối (block). Mỗi khối chứa 2-3 lớp tích chập, sau đó là một lớp pooling.
Pooling Layers
Sau mỗi khối tích chập, VGG-16 sử dụng các lớp max-pooling để giảm kích thước không gian của các đặc trưng, đồng thời giữ lại các đặc trưng quan trọng nhất.
Dense Layers
Các lớp Dense cuối cùng thường được sử dụng trong VGG-16 để thực hiện phân loại, nhưng trong SSD, các lớp này bị loại bỏ để tập trung vào việc trích xuất đặc trưng.
Trong khi VGG-16 là một mạng cơ sở phổ biến, các phiên bản SSD hiện đại thường sử dụng các mô hình như ResNet, MobileNet hoặc Inception làm mạng cơ sở để cải thiện độ chính xác và giảm thiểu tài nguyên tính toán cần thiết. ResNet, chẳng hạn, sử dụng các khối residual giúp duy trì các đặc trưng quan trọng qua các lớp sâu mà không bị mất mát thông tin.
2.2. Extra Feature Layers
Các lớp tích chập bổ sung trong SSD được thiết kế để trích xuất các đặc trưng ở nhiều độ phân giải khác nhau, từ đó giúp phát hiện các đối tượng có kích thước đa dạng trong cùng một hình ảnh.
Các bản đồ đặc trưng (Feature Maps)
SSD sử dụng các bản đồ đặc trưng ở nhiều tỷ lệ khác nhau, từ các bản đồ có độ phân giải cao (nhỏ hơn về kích thước không gian) để phát hiện các đối tượng lớn, đến các bản đồ có độ phân giải thấp (lớn hơn về kích thước không gian) để phát hiện các đối tượng nhỏ.
Lớp tích chập 3×3
Các lớp tích chập bổ sung thường sử dụng các bộ lọc 3×3 để duy trì sự nhất quán trong việc trích xuất đặc trưng ở các tỷ lệ khác nhau.
Lớp kết nối đầy đủ (Fully Connected)
Mặc dù SSD loại bỏ các lớp kết nối đầy đủ trong mạng cơ sở, nhưng nó sử dụng các lớp tích chập với bộ lọc lớn hơn để thực hiện các phép biến đổi tương tự như các lớp Dense truyền thống, đảm bảo rằng các đặc trưng được trích xuất đều có ý nghĩa cho việc phát hiện đối tượng.
2.3. Default Boxes
Một trong những cải tiến chính của SSD so với các phương pháp trước đó là sử dụng bộ khung mặc định (default boxes). Mỗi bộ khung mặc định được gán với một điểm trên bản đồ đặc trưng và đại diện cho một vùng trong hình ảnh đầu vào.
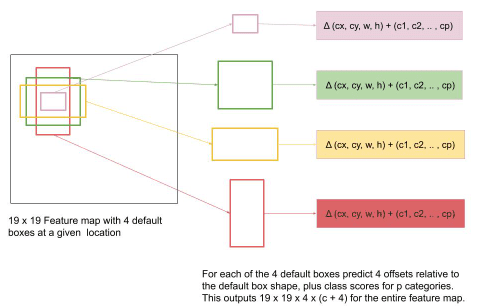
Tỷ lệ khung hình (Aspect Ratios)
Các bộ khung mặc định có nhiều tỷ lệ khung hình khác nhau (1:1, 1:2, 2:1, v.v.) để đảm bảo rằng các đối tượng với hình dạng khác nhau đều có thể được phát hiện. Điều này đặc biệt quan trọng đối với các đối tượng không đồng nhất về kích thước và hình dạng.
Kích thước (Scales)
SSD cũng sử dụng các bộ khung với các kích thước khác nhau, từ nhỏ đến lớn, để phát hiện các đối tượng ở nhiều tỷ lệ khác nhau trong hình ảnh.
Hàm mất mát liên kết (IoU)
SSD sử dụng Intersection over Union (IoU) để đánh giá độ tương đồng giữa các bộ khung mặc định và các đối tượng thực tế trong hình ảnh. Các khung với IoU cao sẽ được coi là phát hiện đúng.
2.4. Loss Function
Hàm mất mát trong SSD là sự kết hợp giữa mất mát phân loại (classification loss) và mất mát tọa độ (localization loss).
Mất mát phân loại
Mất mát này đo lường sự khác biệt giữa nhãn dự đoán và nhãn thực tế của các đối tượng trong hình ảnh. SSD sử dụng hàm softmax cho việc phân loại để tính toán xác suất của từng lớp đối tượng. Nếu không có đối tượng nào trong một bộ khung mặc định, lớp nền (background) sẽ được chọn.
Mất mát tọa độ
Thành phần này đo lường sự khác biệt giữa vị trí dự đoán của bộ khung mặc định và vị trí thực tế của đối tượng trong hình ảnh. SSD sử dụng hàm Smooth L1 loss để tính toán mất mát tọa độ, giúp tránh được các vấn đề về gradient bùng nổ hoặc suy giảm.
3. Ưu điểm của SSD
SSD nổi bật nhờ vào nhiều ưu điểm vượt trội, làm cho nó trở thành một trong những mô hình phát hiện đối tượng phổ biến nhất:
Hiệu suất thời gian thực
SSD có khả năng xử lý hình ảnh và video với tốc độ cực nhanh, từ đó thích hợp cho các ứng dụng thời gian thực như giám sát an ninh, xe tự hành, hoặc các hệ thống nhận diện khuôn mặt.
Khả năng phát hiện đối tượng đa dạng
Nhờ vào cấu trúc nhiều lớp tích chập và các bộ khung mặc định đa dạng, SSD có thể phát hiện các đối tượng với nhiều kích thước và hình dạng khác nhau trong cùng một hình ảnh.
Độ chính xác cao
Dù tốc độ xử lý nhanh, SSD vẫn duy trì được độ chính xác cao nhờ vào kiến trúc thông minh và cách tiếp cận kết hợp giữa các bản đồ đặc trưng ở nhiều độ phân giải.
4. Hạn chế của SSD
Mặc dù SSD có nhiều ưu điểm, nhưng nó cũng có một số hạn chế cần được khắc phục:
Hiệu suất kém trên các đối tượng nhỏ
Một trong những hạn chế chính của SSD là khó khăn trong việc phát hiện các đối tượng nhỏ trong hình ảnh, do các bản đồ đặc trưng ở độ phân giải thấp không thể nắm bắt đầy đủ chi tiết.
Nhạy cảm với kích thước đầu vào
SSD hoạt động tốt nhất với kích thước đầu vào cố định (ví dụ: 300×300 hoặc 512×512 pixel). Khi thay đổi kích thước đầu vào, hiệu suất của mạng có thể bị ảnh hưởng, đặc biệt là khi kích thước quá lớn hoặc quá nhỏ.
Yêu cầu tài nguyên tính toán
Mặc dù không đòi hỏi nhiều như các mạng phức tạp hơn như Faster R-CNN, SSD vẫn yêu cầu một lượng tài nguyên tính toán đáng kể, đặc biệt là khi sử dụng các phiên bản lớn hơn như SSD512.
5. Các phiên bản SSD
Kể từ khi SSD được giới thiệu, nhiều phiên bản và biến thể của nó đã được phát triển để cải thiện hiệu suất và đáp ứng nhu cầu cụ thể của các ứng dụng khác nhau.
5.1. SSD300
Đây là phiên bản tiêu chuẩn và được coi là cốt lõi của mô hình SSD. Với kích thước đầu vào cố định là 300×300 pixel, SSD300 cung cấp sự cân bằng tốt giữa tốc độ và độ chính xác. SSD300 được thiết kế để xử lý hình ảnh nhanh chóng và là một trong những mô hình phát hiện đối tượng nhanh nhất trong lớp của nó.
5.2. SSD512
Đây là một phiên bản nâng cấp của SSD với kích thước đầu vào lớn hơn (512×512 pixel), cho phép phát hiện các đối tượng nhỏ tốt hơn, nhưng đổi lại tốc độ xử lý chậm hơn so với SSD300.
5.3. DSSD (Deconvolutional Single Shot Detector)
DSSD sử dụng các lớp deconvolutional để cải thiện khả năng phát hiện đối tượng nhỏ bằng cách tăng cường độ phân giải của các bản đồ đặc trưng. Điều này giúp DSSD duy trì được sự cân bằng giữa tốc độ và độ chính xác.
5.4. FSSD (Feature Fusion SSD)
FSSD là một biến thể của SSD sử dụng kỹ thuật kết hợp đặc trưng (feature fusion) từ nhiều lớp khác nhau trong mạng để nâng cao độ chính xác của việc phát hiện đối tượng. Điều này đặc biệt hữu ích trong các tình huống mà các đối tượng có kích thước và hình dạng phức tạp.
5.5. PeleeNet SSD
Đây là một phiên bản nhẹ của SSD sử dụng mạng PeleeNet làm mạng cơ sở, với mục tiêu là giảm thiểu tài nguyên tính toán cần thiết mà vẫn duy trì được hiệu suất cao. PeleeNet SSD rất phù hợp cho các ứng dụng trên thiết bị di động và các hệ thống nhúng.
5.6. SSDLite
SSDLite là một phiên bản nhẹ hóa của SSD, được tối ưu hóa cho các ứng dụng trên thiết bị di động. Nó sử dụng các lớp tích chập chiều sâu (depthwise separable convolutions) để giảm thiểu số lượng tham số và cải thiện tốc độ xử lý.
6. Ứng dụng của SSD

SSD đã được ứng dụng rộng rãi trong nhiều lĩnh vực nhờ vào tốc độ và độ chính xác của nó:
6.1. Giám sát an ninh
SSD được sử dụng trong các hệ thống giám sát an ninh để phát hiện và theo dõi các đối tượng đáng ngờ trong thời gian thực. Với khả năng xử lý nhanh, SSD có thể phát hiện và cảnh báo về các tình huống nguy hiểm một cách kịp thời.
6.2. Xe tự hành
Trong các hệ thống xe tự hành, SSD đóng vai trò quan trọng trong việc phát hiện các vật cản trên đường như người đi bộ, xe cộ, hoặc động vật. Điều này giúp xe tự hành đưa ra các quyết định lái xe an toàn và chính xác.
6.3. Robot và tự động hóa công nghiệp
SSD được sử dụng trong các hệ thống robot và tự động hóa công nghiệp để phát hiện và phân loại các sản phẩm trên dây chuyền sản xuất. Với khả năng phát hiện đối tượng nhanh chóng, SSD giúp tăng cường hiệu suất và giảm thiểu lỗi trong quá trình sản xuất.
6.4. Thực tế tăng cường (AR)
SSD được sử dụng trong các ứng dụng thực tế tăng cường để phát hiện các đối tượng trong môi trường thực tế và chồng ghép các thông tin ảo lên đó. Điều này tạo ra các trải nghiệm tương tác và sống động cho người dùng.
6.5. Phân tích video thể thao
SSD có thể được sử dụng để nhận diện và theo dõi các vận động viên trong các trận đấu thể thao, cung cấp dữ liệu quan trọng cho việc phân tích chiến thuật hoặc đánh giá hiệu suất của các vận động viên.
7. Hướng phát triển
SSD đã đánh dấu một bước tiến lớn trong lĩnh vực phát hiện đối tượng, nhưng công nghệ không dừng lại ở đó. Trong tương lai, chúng ta có thể mong đợi sự phát triển của các phiên bản SSD cải tiến hơn với hiệu suất cao hơn, khả năng xử lý đối tượng nhỏ tốt hơn và ít đòi hỏi tài nguyên hơn.
Một số xu hướng phát triển bao gồm:
Transfer Learning
Việc tích hợp học tập chuyển giao vào các mô hình SSD có thể giúp cải thiện hiệu suất khi áp dụng cho các nhiệm vụ cụ thể hoặc các tập dữ liệu nhỏ. Điều này đặc biệt hữu ích trong các ứng dụng cần phải xử lý dữ liệu đa dạng từ nhiều nguồn khác nhau.
Mạng phát hiện đối tượng nhẹ hơn
Các nghiên cứu đang hướng tới việc tạo ra các mô hình phát hiện đối tượng nhẹ hơn, tiêu thụ ít tài nguyên hơn nhưng vẫn duy trì hiệu suất cao. Điều này sẽ mở ra cánh cửa cho việc áp dụng SSD trong các thiết bị nhúng và di động.
Học tập tăng cường (Reinforcement Learning)
Việc kết hợp học tập tăng cường vào phát hiện đối tượng có thể giúp cải thiện khả năng thích ứng của các mô hình SSD trong môi trường phức tạp và thay đổi liên tục. Các mô hình này có thể học từ kinh nghiệm và tối ưu hóa quy trình phát hiện đối tượng theo thời gian.
Cải thiện mô hình nhẹ hơn và nhanh hơn
Với sự phát triển của phần cứng và các kỹ thuật tối ưu hóa mới, các mô hình SSD có thể được cải thiện để trở nên nhẹ hơn, nhanh hơn, và hiệu quả hơn, đặc biệt là cho các ứng dụng trên thiết bị di động và trong các hệ thống yêu cầu độ trễ thấp.
Phát triển các kỹ thuật trích xuất đặc trưng tốt hơn
Việc phát triển các kỹ thuật trích xuất đặc trưng tiên tiến có thể giúp cải thiện khả năng của SSD trong việc phát hiện các đối tượng nhỏ hoặc đối tượng ở các điều kiện ánh sáng khác nhau. Điều này sẽ mở ra các ứng dụng mới cho SSD trong các môi trường khó khăn như giám sát ban đêm hoặc trong điều kiện ánh sáng yếu.
8. Kết luận
SSD (Single Shot Detector) đã cách mạng hóa lĩnh vực phát hiện đối tượng bằng cách kết hợp sự cân bằng hoàn hảo giữa tốc độ và độ chính xác. Nhờ vào cấu trúc đơn giản nhưng mạnh mẽ, SSD đã trở thành một công cụ không thể thiếu trong nhiều ứng dụng trí tuệ nhân tạo và thị giác máy tính. Mặc dù có một số hạn chế nhất định, SSD vẫn tiếp tục được cải tiến và mở rộng để đáp ứng nhu cầu ngày càng cao của các hệ thống phát hiện đối tượng hiện đại.
Trong tương lai, với sự tiến bộ của công nghệ và các phương pháp mới, SSD có thể trở thành nền tảng cho nhiều ứng dụng tiên tiến hơn, từ giám sát an ninh, lái xe tự hành, đến các hệ thống robot thông minh và thực tế tăng cường. Sự phát triển không ngừng của SSD và các biến thể của nó sẽ tiếp tục thúc đẩy sự tiến bộ trong lĩnh vực phát hiện đối tượng và mở ra các cơ hội mới cho việc ứng dụng trí tuệ nhân tạo trong cuộc sống hàng ngày.